ロボットはポテトチップスを割れずに持つことができるか?
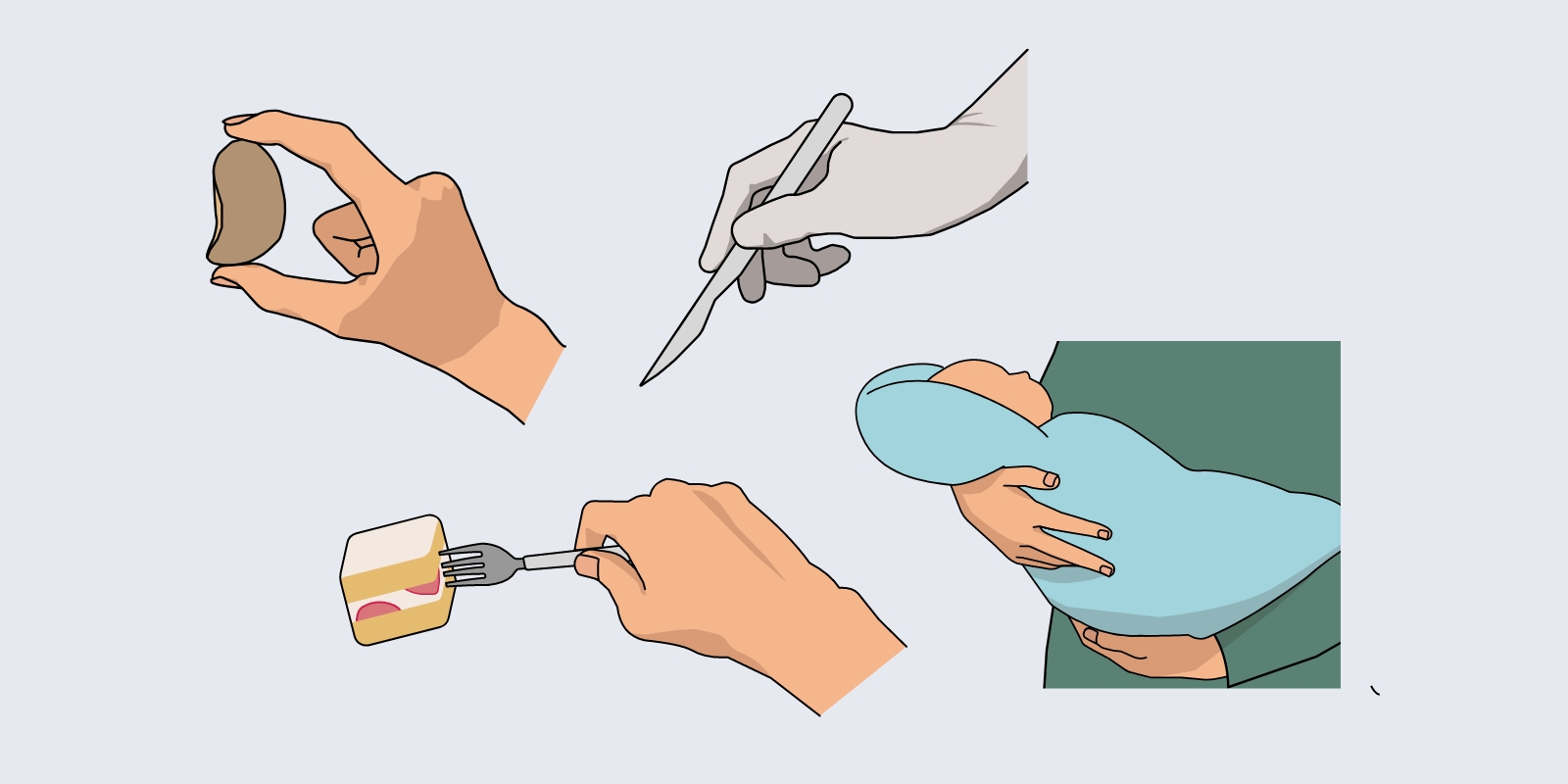
私達の手は、ポテトチップスを割らずにつかみ、ケーキを潰さずに持ち、ハンマーをしっかりと握ります。人間は、物の性質を瞬時に判断して、触る・握る・持つ時の手の力加減を調整します。間違って強く握ったとしても、すぐに力をゆるめて調節もできます。人間に備わっているこのような感覚を、「力触覚」※1といいます。
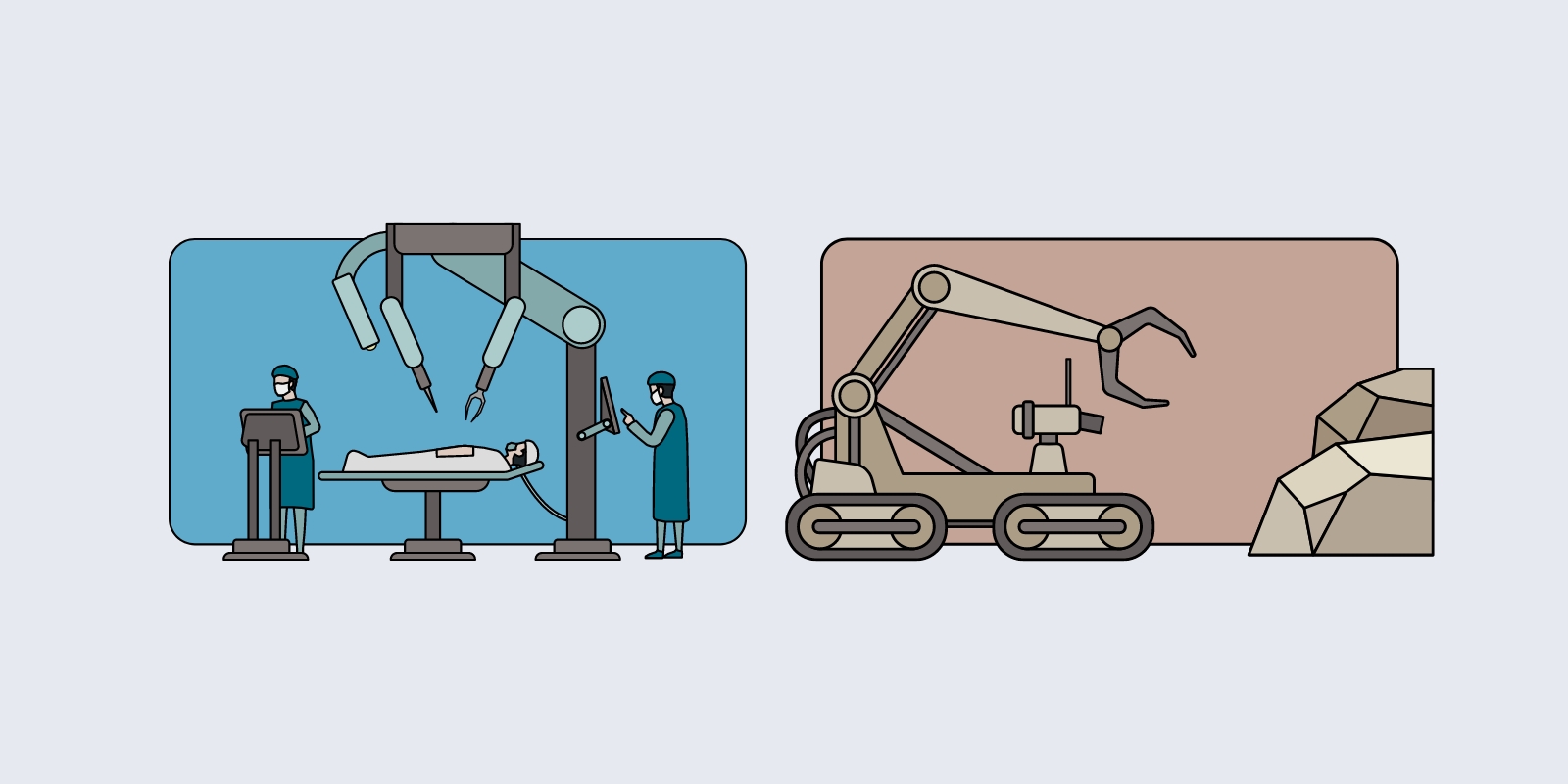
今、介護、医療、農業などのさまざまな分野で、人が行っている仕事を代用できるように、ロボットを役立てようとしています。しかし、ロボットにはこの「力触覚」の機能がありません。寝たきりの患者さんを持ち上げたり、りんごやみかんなどの収穫物をもぎ取ったりする現場でロボットが活躍するためには、「力触覚」に応じて安全に力加減を制御できる技術が必要となります。私達は、ロボットが「力触覚」を自在にコントロールするための力触覚制御技術「リアルハプティクス®」※2を開発しました。
- ※1 力触覚:物を触ったり手にしたりした時の感覚。物から受ける手応えによって、硬さ、柔らかさ、弾力性、動きなどを把握する。
- ※2 リアルハプティクス:力触覚を「データ化」し、伝送することが可能になる技術。リアルハプティクス®はモーションリブ株式会社の所有する登録商標です。
力触覚の研究から約70年越しの実用化
世界におけるハプティクス(触覚技術)の研究は、1940年代にアメリカの国立研究所が放射性物質を遠隔操作で取り扱うために開発したことから始まりました。その後、さまざまな触覚の伝達や遠隔操作機械の開発が行われましたが、使っている人に力・振動・動きなどを与えることで皮膚感覚フィードバックを得る技術としてのハプティクスの研究が行われてきました。しかし現在開発されているハプティクスは、ほとんどがヴァーチャルな疑似体験です。本当に触れているかのようなヴァーチャルな感覚を、使っている人に錯覚させるというものです。
一方、慶應義塾大学グローバルリサーチインスティテュートハプティクス研究センターで長年研究・開発を進め、基本特許を有している力触覚伝送技術リアルハプティクス®は、人間が握ったり触ったりして物体の硬さや動きを感じて得る情報を、物体と双方向で伝送し、リアルな力触覚を高精度に再現する技術です。
リアルハプティクス®の技術は、慶應義塾大学グローバルリサーチインスティテュートの大西公平教授(開発当時。現・特任教授)が特殊なアルゴリズム※3を開発して、2002年に初めて実現したものです。
- ※3 アルゴリズム:手順や計算方法
ロボットアームがポテトチップスを割らずにつかむ方法


本当に自分の手で触っている感触が得られるリアルハプティクス®は、今後は移動ロボットや、遠隔地の患者のリハビリ、医師や職人の熟練技術を再現できるロボットなどの実現化に役立つことが期待できます。
ロボットのやさしいチカラを実現!リアルハプティクス®のためのAbcCore
モーションリブでは、リアルハプティクス®を簡単に実装するためのコントローラICチップ「AbcCore」を製造・販売しています。「AbcCore」は、やさしい力加減で触る技術や、目に見えないほど小さいものや薄いものを扱う感覚を増幅させて取得したデータを、ロボットに搭載させるためのものです。

AbcCoreは、人の力加減をともなう動き、物体の硬さや柔らかさの感触などの力触覚情報を瞬時にデータ化し、記録、編集、再現します。この技術により、力センサを使わずに力触覚をともなう計測可視化・分析、遠隔操作、自動化、感触の再現が簡単に可能となります。
遠隔PCR検査にもリアルハプティクス®を活用
新型コロナウイルスやインフルエンザなどによる感染症流行では、感染の有無を確認するために検体検査が必要です。皆さんもPCR検査という言葉をニュースでよく聞いたと思います。患者さんから検体を採取する際には、医療従事者と患者さんとが直接対面して行う必要があるため、医療従事者の感染リスクが高まることが問題でした。

ロボットに伝わる感触を、操作する医療従事者も感じることができ、医療従事者の動作をデータ化してロボットに自動動作をさせることも可能となります。他にも医療現場では、熟練の医師による遠隔手術などの活用も考えられます。
グローブ型のハンド操作もできる!建設現場での実証実験
これは、建設重機のオペレーターが、重機の先端部が触れた物体の力や動き、触覚を感じながら作業ができるように開発された油圧駆動の建設重機システムの実証実験を行ったときのものです。実証実験では、油圧ショベルに、力の倍率を2,000倍、距離の倍率を16倍と設定し、厚さや性質の異なる10数種類の建設資材を、最適な力加減で運ぶことができることが確認できました。
実験ではレバー型とハンド型の操作装置を使用。グローブ型のハンド操作では、重機の操縦になれていない人でも感覚的に操作できます。リアルハプティクス®によって、アニメや漫画のロボット操作の世界がぐんと近付いてくるのではないでしょうか。
触覚をもった柔らかいロボット誕生が切り拓く未来
少子高齢化社会の日本は、2060年には総人口約8600万人になると推計されています。そのうち生産年齢の人口は約4400万人。労働力は激減し、労働生産力も減少します。さまざまな分野でリアルハプティクス®の技術を実用化し、人の代わりに働ける、触覚をもった柔らかいロボットの誕生こそが社会問題の解決につながると、私達は確信を持っています。皆さんが大人になった頃には、触覚をもったロボットが未来を切り拓いているかもしれません。皆さんも社会問題を解決するにはどうしたらいいのか、想像力を働かせて、よりよい社会を考えていただけたらと思います。
今からもっと科学と遊ぼう!親しもう!
モーションリブでは、子どもたちに向けて「科学と遊ぶ」イベントを開催するなどの活動を積極的に行っています。小さい頃から科学と遊び親しむことで、身近な疑問の解決や新しい知識に出合ってほしいと思います。たとえば大学の研究室から生まれたリアルハプティクス®の技術は、誰もが知っている技術ではありません。もっとこの技術のことを皆さんに知ってもらい、どんなことに活用できるのか、2060年の社会に役立てる方法を考えてもらえると嬉しいです。

動画インタビュー いろいろなものに疑問を感じて解決していこう
インタビュー動画では、子どもの頃の話、モーションリブとリアルハプティクス®への思い、皆さんへのメッセージをお話いただきました。